Geraden 2012 13
Inhaltsverzeichnis |
Darstellung von Geraden
Die Parameterform
Eine Möglichkeit ist es Geraden mit Hilfe von zwei Vektoren darzustellen. Hierfür wir zum einen ein Stützvektor, zum anderen ein Richtungsvektor benötigt.
Normierung eines Vektors
Manchmal ist es bei einem Vektor von größerem Interesse in welche Richtung er zeigt, als welche Länge (Betrag) er besitzt.
In solchen Fällen wird der Vektor durch seine Länge geteilt und hat dann damit die Länge Eins. Nun ist es wesentlich bequemer mit diesem normierten Vektor zu rechnen, als mit dem unnormierten Vektor.
Rechnerisch ergibt sich der Betrag eines Vektors aus der Wurzel des Skalarproduktes mit sich selbst.
Beispiel:
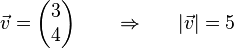
Nun wird der Vektor durch seinen Betrag geteilt:

Der Normalenvektor
Definition des Normalenvektors
Sei g eine Gerade. Ein Vektor  heisst genau dann Normalenvektor von g, wenn senkrecht zu der Geraden g steht.
heisst genau dann Normalenvektor von g, wenn senkrecht zu der Geraden g steht.
Der Punkt A an dem sich ein Normalenvektor mit der Geraden schneidet, wird auch Aufpunkt genannt.
Skizze eines Normalenvektors
Eigenschaften des Normalenvektors
Sei g eine Gerade mit  und
und  der Normalenvektor auf g , mit
der Normalenvektor auf g , mit 

 Im Raum gibt es unendlich viele Normalenvektoren zu einer Gerade g und einem Aufpunkt A.
Im Raum gibt es unendlich viele Normalenvektoren zu einer Gerade g und einem Aufpunkt A.
Ist in der Ebene von einer Geraden ein Punkt P und ihr Normalenvektor bekannt, so wird diese hierdurch eindeutig beschrieben.
Sei  ein beliebiger Ortsvektor auf der Geraden g, da der Normalenvektor senkrecht zu der Geraden steht, so steht auch senkrecht zu jedem anderen Vektor
ein beliebiger Ortsvektor auf der Geraden g, da der Normalenvektor senkrecht zu der Geraden steht, so steht auch senkrecht zu jedem anderen Vektor  der Geraden g.
der Geraden g.
Da die beiden Vektoren und senkrecht zueinander stehen, muss das Skalarprodukt dieser beiden Vektoren Null ergeben:

(geometrische Deutung)
Hesseform
(Otto Hesse, deutscher Mathematiker, von 1811-1874)
Aus den Eigenschaften des Normalenvektors einer Gerade, wollen wir nun auf eine neue Darstellungsform von Geraden in der Ebene schliessen.
Wir fassen zusammen:
Eine Gerade g in der Ebene ist durch einen Punkt A auf der Geraden und einen Normalenvektor n eindeutig festgelegt.
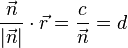
Ein jeder Ortsvektor eines Punktes der Geraden erfüllt die folgende Gleichung:

diese Gleichung wird auch Punktnormalengleichung der Geraden genannt.
Das Skalarprodukt  ist natürlich bestimmbar, wenn zumindest der Punkt A und ein Normalenvektor
ist natürlich bestimmbar, wenn zumindest der Punkt A und ein Normalenvektor  gegeben sind. Dies ist eine reele Zahl c, also lässt sich die Punktenormalengleichung noch etwas umschreiben:
gegeben sind. Dies ist eine reele Zahl c, also lässt sich die Punktenormalengleichung noch etwas umschreiben:

Diese Gleichung wird nun allgemeine Normalengleichung der Geraden genannt.
Wird nun noch zusätzlich der Normalenvektor normiert so sprechen wir von der Hesseform der Geraden: