Klassifizierung von Bewegungen aus der Sicht der Gruppe der Bewegungen
Das Whiteboard zur Übung

Kurzfassung
Zur Vorbereitung auf die Prüfung ist es sinnvoll, das bisher gelernte umzustrukturieren.
Vor drei Wochen haben wir die alle Bewegungen auf der Grundlage des Reduktionssatzes klassifiziert. Der Reduktionssatz sagt aus, dass jede Bewegung die NAF von zwei oder drei Geradenspieglungen ist. Um herauszufinden, welche Typen von Bewegungen es prinzipiell geben kann, untersucht man alle Konstellationen die bei zwei oder drei Geraden auftreten können. Auf der Grundlage der jeweiligen Konstellation (Geraden sind parallel, haben genau einen Punkt gemeinsam, etc.) untersucht man was die NAF der Spiegelungen an eben diesen Geraden ergibt.
Man stellt fest:
Es gibt genau vier Typen von Bewegungen:
- Geradenspiegelungen
- Drehungen
- Verschiebungen
- Schubspiegelungen
Wir wissen ferner, dass die Bewegungen bzgl. der NAF von Abbildungen eine Gruppe bilden. Es wäre jetzt interessant zu untersuchen, wie sich die dieser Gruppe aus Sicht der bereits erfolgten Klassifizierung verhalten. Konkret untersuchen wir in diesem Kontext die folgende Verknüpfungstafel:
 |
Geradenspiegelung | Drehung | Verschiebung | Schubspiegelung |
| Geradenspiegelung |  |
|
|
|
| Drehung | |
|
|
|
| Verschiebung | |
|
|
|
| Schubspiegelung | |
|
|
|
In der Übung konnten wir die Verknüpfungstafel wie folgt ausfüllen:
| |
Geradenspiegelung | Drehung | Verschiebung | Schubspiegelung |
| Geradenspiegelung | Drehung oder Verschiebung | |
|
|
| Drehung | |
Drehung oder Verschiebung | |
|
| Verschiebung | |
|
Verschiebung |
|
| Schubspiegelung | |
|
|
Auf jeden Fall entsteht eine den Umlaufsinn erhaltende Abbildung. |
Prinzipielle Vorgehensweise zu dieser Untersuchung:
- Jede Bewegung ist die NAF von zwei oder drei Geradenspiegelungen. Wir haben zwei nacheinander auszuführende Bewegungen gegeben. Wir überlegen, wie man diese Bewegungen prinzipiell durch zwei oder drei Geradenspieglungen ersetzen kann.
- Die Darstellung einer Bewegung durch die NAF von zwei oder drei Geradenspiegelungen ist nicht eindeutig. Wir wählen die Konstelltion der Spiegelgeraden so, dass in der NAF der vier, fünf oder sechs nacheinander auszuführenden Geradenspiegelungen möglichst viele der Teilprodukte die Identität ergeben.
- Übrig bleiben dann zwei oder drei Geradenspiegelungen, denen wir dann den Typ von Bewegung zuordnen, der sich durch die NAF der Geradenspiegelungen ergibt, die übrig bleiben.
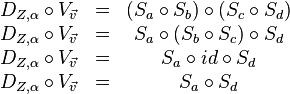
Beispiel: Drehung mal Verschiebung
Gegeben:  und
und 
Gesucht: 
Die Verschiebung ist die NAF von zwei Geradenspiegelungen  mit
mit  .
.
Wir wählen  derart, dass
derart, dass 
Die Drehung ersetzen wir wir durch die NAF von zwei Geradenspiegelungen  mit
mit  .
.
Im Kontext der Erfüllung der genannten Bedingungen für  haben wir unendlich viele Möglichkeiten,
haben wir unendlich viele Möglichkeiten,  und
und  zu bestimmen. Wir wählen derart, dass
zu bestimmen. Wir wählen derart, dass  gilt.
gilt.
ergibt sich dann durch Drehung von um  mit
mit  .
.
Es gilt jetzt:
und waren als identische Geraden parallel zu  . Weil nicht parallel zu war, ist nicht parallel zu .
. Weil nicht parallel zu war, ist nicht parallel zu .  ist also eine Drehung um den Schnittpunkt von und . Aus dem Stufenwinkelsatz folgt, dass diese Drehung den Drehwinkel
ist also eine Drehung um den Schnittpunkt von und . Aus dem Stufenwinkelsatz folgt, dass diese Drehung den Drehwinkel  hat.
hat.
Wir können die Tabelle also ergänzen:
| |
Geradenspiegelung | Drehung | Verschiebung | Schubspiegelung |
| Geradenspiegelung | Drehung oder Verschiebung | |
|
|
| Drehung | |
Drehung oder Verschiebung | Drehung |
|
| Verschiebung | |
Drehung | Verschiebung |
|
| Schubspiegelung | |
|
|
Auf jeden Fall entsteht eine den Umlaufsinn erhaltende Abbildung. |